

CollaMamba: эффективная платформа для совместного восприятия в автономных системах
Практические решения для повышения точности и эффективности
Коллаборативное восприятие стало критической областью исследований в автономном вождении и робототехнике. Важно, чтобы агенты, такие как автомобили или роботы, совместно работали для более точного и эффективного понимания окружающей среды. Путем обмена сенсорными данными между несколькими агентами повышается точность и глубина восприятия окружающей среды, что приводит к созданию более безопасных и надежных систем.
Одним из ключевых вызовов в многозаголовочном восприятии является управление огромными объемами данных при эффективном использовании ресурсов. Традиционные методы должны помогать балансировать спрос на точное пространственное и временное восприятие на большие расстояния, минимизируя вычислительные и коммуникационные издержки.
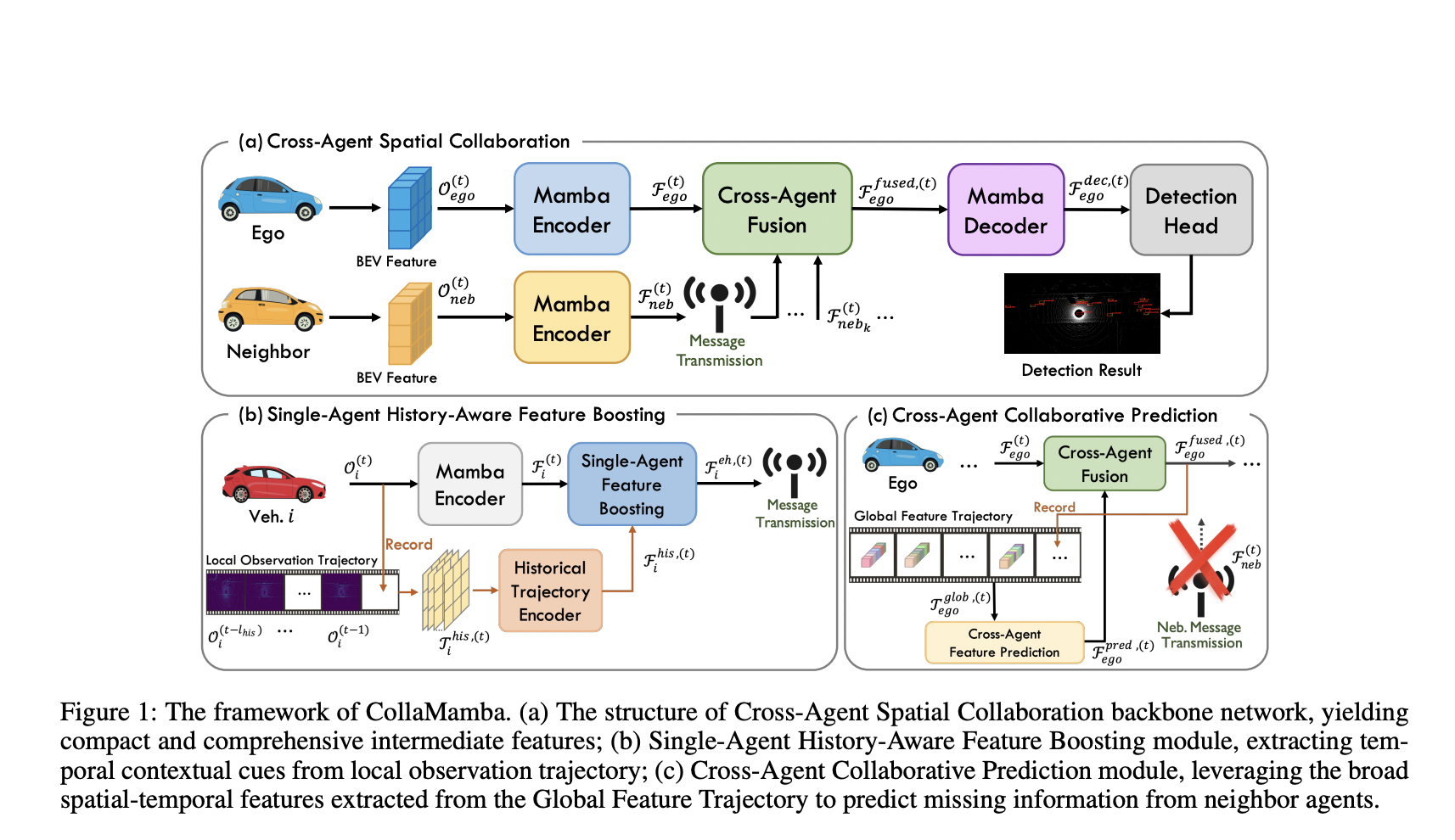
Множество систем многозаголовочного восприятия в настоящее время используют методы на основе CNN или трансформаторов для обработки и слияния данных между агентами. Система CollaMamba представляет собой инновационное решение, которое эффективно моделирует пространственные и временные зависимости между агентами, предоставляя ресурсоэффективное решение.
Улучшения производительности и эффективности
Модель CollaMamba демонстрирует значительные улучшения по сравнению с существующими методами, превосходя их на различных наборах данных. Одним из ключевых результатов является значительное снижение требований к ресурсам: CollaMamba сократила вычислительные издержки до 71,9% и уменьшила коммуникационные издержки в 64 раза.
CollaMamba является практичным решением для автономных систем, обеспечивая эффективное восприятие, даже в условиях непостоянной коммуникации между агентами.

















